


Operating Voltage: 4.8-8.4V
Operating speed: 0.14sec/60° @ 6V
Operating speed: 0.13sec/60° @ 7.4V
Operating speed: 0.12sec/60° @ 8.4V
Stall Torque: 60 kg-cm (835 oz-in) @ 6V
Stall Torque: 65 kg-cm (905 oz-in) @ 7.4V
Stall Torque: 70 kg-cm (975 oz-in) @ 8.4V
Operating speed: 0.14sec/60° @ 6V
Operating speed: 0.13sec/60° @ 7.4V
Operating speed: 0.12sec/60° @ 8.4V
Stall Torque: 60 kg-cm (835 oz-in) @ 6V
Stall Torque: 65 kg-cm (905 oz-in) @ 7.4V
Stall Torque: 70 kg-cm (975 oz-in) @ 8.4V
Coreless Digital Motor
Max Angle:180°
Pulse width:1000-2000μs=90°
Pulse width:500-2500μs=180°
Dead band: 2μs 1520μs / 330hz Lifetime: >100000 times without load
Size: 40X20X40.5mm
Weight:80g
Ball Bearing 2BB
Stainless steel Gear
Aluminum Case
Wire length : 300mm Wire plug type: JR plug 26AWG
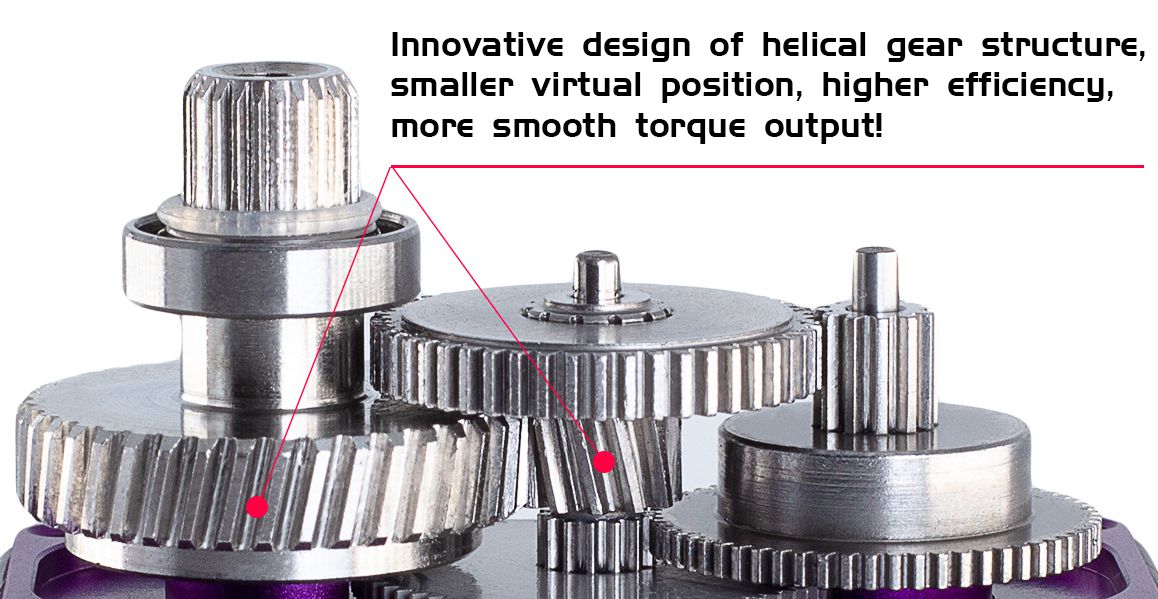
Enhanced reliability of torque output
The drive virtual position is smaller than the market straight tooth structure
Working condition is smoother
High performance digital standard servo, high precision all metal gear
CNC aluminum alloy housing, double ball bearings
(Control Angle 180°)

Features:
1. High temperature resistant waterproof brushless controllable drive motor with large torque, with autonomous program, to achieve excellent efficiency of matching.
2. Magnetic potentiometer, its water resistant medium and no contact and no wear when working internal characteristics, so that the steering gear in the left and right stroke work, start and stop positioning accuracy and precision in return, combined with the autonomy program, highlight the best adaptation of efficiency.
3. High strength integrated steel tooth, tooth body is not loose and durable, not easy to sweep teeth, improve the meshing precision of gear system and make the virtual position controllable.
4. With excellent performance of anti-blocking technology, real-time monitoring of load state, so that the steering gear is not easy to damage.
5. Use digital mute technology and iterate to improve product quality.
6. Import high resolution IC to 4096 resolution, integration of autonomous digital circuit, its data processing more faster and more fluent.
7. The imported breathable composite waterproof adhesive can cover and seal the circuit board, so that the heat generated by the circuit board can be freely dispersed while the water medium can not enter, so as to achieve excellent waterproof effect.
Control Angle definition:
>The default Angle of the model remote is about 60 degrees.
>Controllable Angle 120 degrees, usually used for: RC model car, RC aircraft model, RC ship model. Pulse width 900-2100 us
>Controllable Angle 180 degrees, suitable for: robot joints, industrial development, pulse width 500-2500us
>Controllable Angle 270 degrees, suitable for: robot joints, industrial development, pulse width 500-2500us
>Controllable Angle 360 degrees, using magnetic sensor potentiometer, suitable for: robot joints, head, industrial development, pulse width 500-2500us
>360 degree continuous rotation is not controllable, commonly used in: stranded, industrial development, pulse width 500-2500us
>1400-1600us is the stop state, the more to 500 or 2500us speed and torque is greater (faster).
>Different control methods and large Angle of contact customer service customization.
Pulse width:1000-2000μs=90°
Pulse width:500-2500μs=180°
Dead band: 2μs 1520μs / 330hz Lifetime: >100000 times without load
Size: 40X20X40.5mm
Weight:80g
Ball Bearing 2BB
Stainless steel Gear
Aluminum Case
Wire length : 300mm Wire plug type: JR plug 26AWG
Enhanced reliability of torque output
The drive virtual position is smaller than the market straight tooth structure
Working condition is smoother
High performance digital standard servo, high precision all metal gear
CNC aluminum alloy housing, double ball bearings
(Control Angle 180°)


Features:
1. High temperature resistant waterproof brushless controllable drive motor with large torque, with autonomous program, to achieve excellent efficiency of matching.
2. Magnetic potentiometer, its water resistant medium and no contact and no wear when working internal characteristics, so that the steering gear in the left and right stroke work, start and stop positioning accuracy and precision in return, combined with the autonomy program, highlight the best adaptation of efficiency.
3. High strength integrated steel tooth, tooth body is not loose and durable, not easy to sweep teeth, improve the meshing precision of gear system and make the virtual position controllable.
4. With excellent performance of anti-blocking technology, real-time monitoring of load state, so that the steering gear is not easy to damage.
5. Use digital mute technology and iterate to improve product quality.
6. Import high resolution IC to 4096 resolution, integration of autonomous digital circuit, its data processing more faster and more fluent.
7. The imported breathable composite waterproof adhesive can cover and seal the circuit board, so that the heat generated by the circuit board can be freely dispersed while the water medium can not enter, so as to achieve excellent waterproof effect.
Control Angle definition:
>The default Angle of the model remote is about 60 degrees.
>Controllable Angle 120 degrees, usually used for: RC model car, RC aircraft model, RC ship model. Pulse width 900-2100 us
>Controllable Angle 180 degrees, suitable for: robot joints, industrial development, pulse width 500-2500us
>Controllable Angle 270 degrees, suitable for: robot joints, industrial development, pulse width 500-2500us
>Controllable Angle 360 degrees, using magnetic sensor potentiometer, suitable for: robot joints, head, industrial development, pulse width 500-2500us
>360 degree continuous rotation is not controllable, commonly used in: stranded, industrial development, pulse width 500-2500us
>1400-1600us is the stop state, the more to 500 or 2500us speed and torque is greater (faster).
>Different control methods and large Angle of contact customer service customization.


